Multimedia Materials
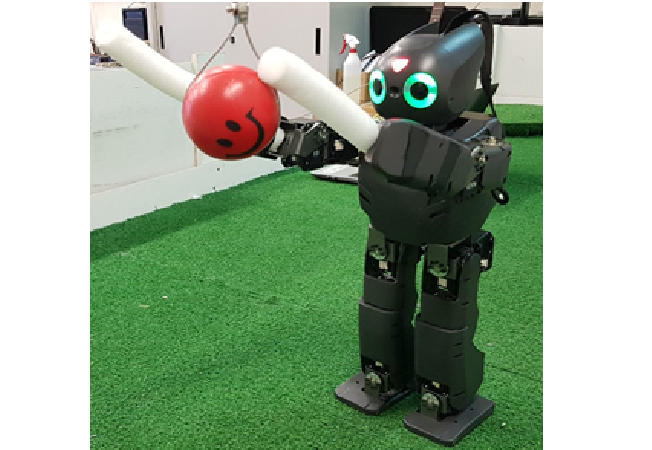
Body size learning
Jul, 2018
Bio-inspired model for body-size learning applied on the humanoid robot Darwin-OP.
Supplementary Material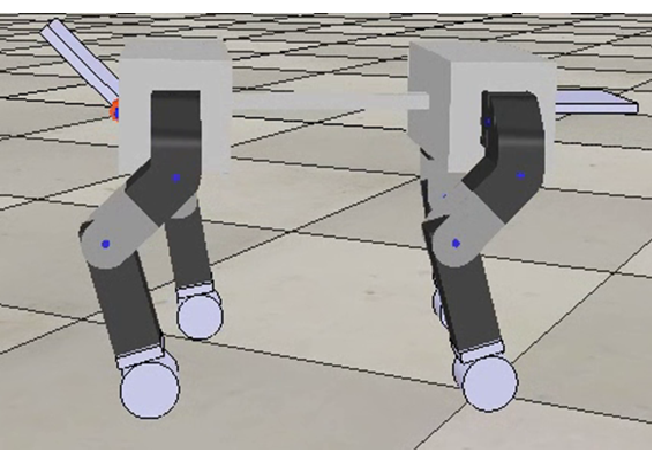
Quadruped locomotion
Jul, 2018
CNN-based locomotion control of a quadruped robot and the role of sensory feedback.
Supplementary Material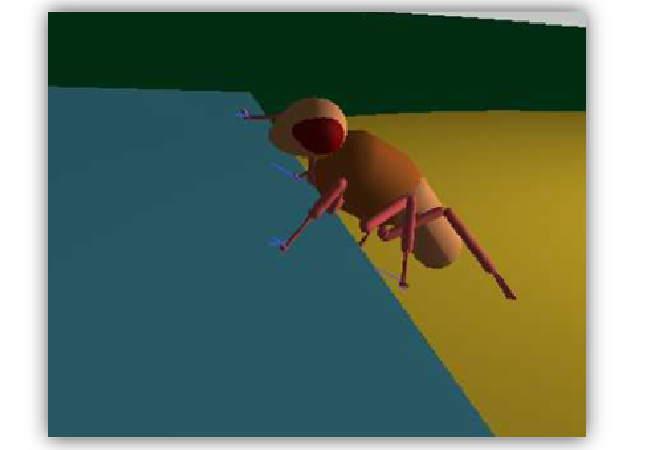
Motor-skill learning
Jul, 2018
Motor-skill learning: a neuro-computational control system inspired by insects.
Supplementary Material
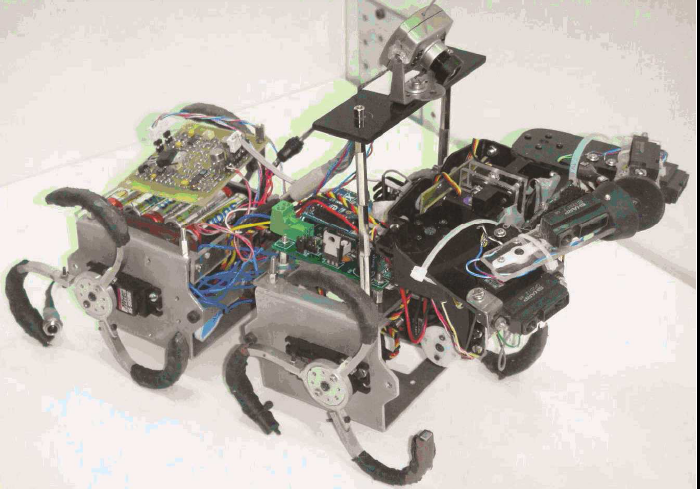
Landslide monitoring
Feb, 2019
Bio-inspired robotic structure for smart sensor deployment.
Supplementary Material
Balance control in quadrupeds
Nov, 2022
Unsupervised learning of quadruped robot balancing
Supplementary Material